Aesthetics of Mobility
This was a project to create a biologically inspired mechanically powered movement. My initial attraction was focused around a jumping motion—something that didn’t just walk across the surface of the table in a strange way. This direction not only satisfied my curiosity and thirst to create something that could jump, it proved to be a sizeable challenge, forcing me to consider a large variety of new and interesting ways to make a jumping motion possible.
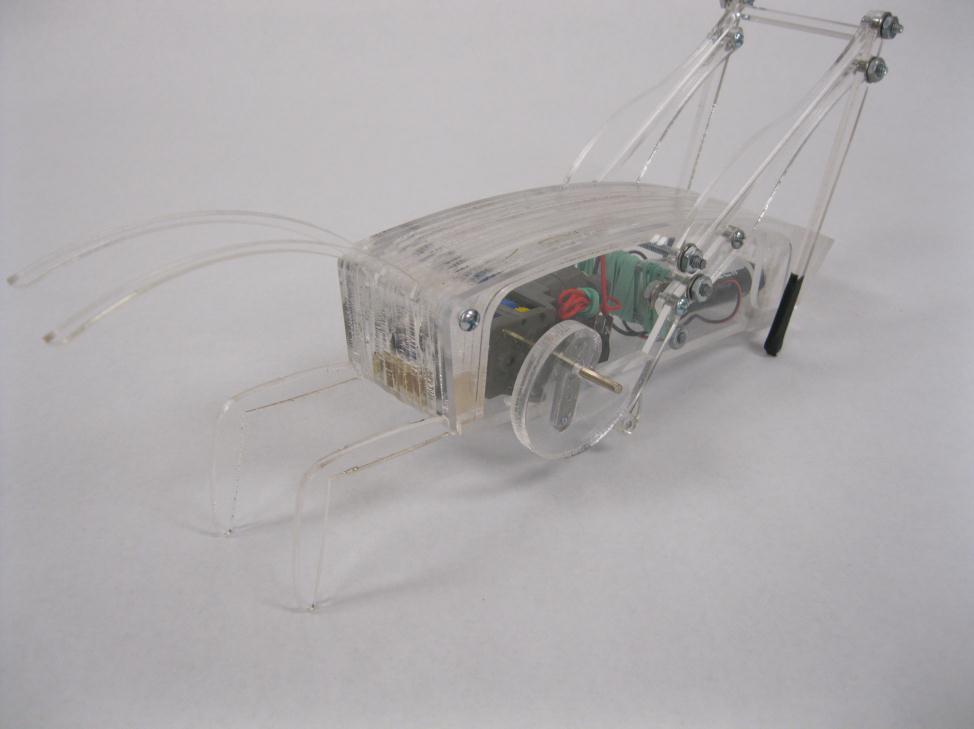
Starting with a motor and a set of gears, I took off exploring the various known jumping robots to research the current field of knowledge. I then did quite a bit of parallel research on insects, primarily the flea, grasshopper, and locust. This research led me to discover ‘Resilin,’ which is an elastomeric protein that naturally occurs in many insects. This protein is a tiny rubber-band of sorts, with a virtually limitless lifetime of uses. This amazing protein led me to make my own potential energy storage system—via dual spiral cams on the side of the grasshopper to build up a large amount of potential energy in a series of rubber bands (my mechanical grasshopper’s Resilin). Once the spiral spins to its tip, the legs disengaged from the spiral, instantly causing the rubber bands to snap the feet down, creating a repeated hopping motion with each turn of the spiral.
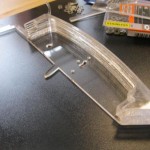
Because this was more a motion study and less an art form, I chose to make the ‘grasshopper’ out of clear acrylic allowing the user to inspect the inner-workings of the project. I also designed the form of the grasshopper to appear playful because large insects can otherwise easily appear distasteful, which could drive the user away from the project.
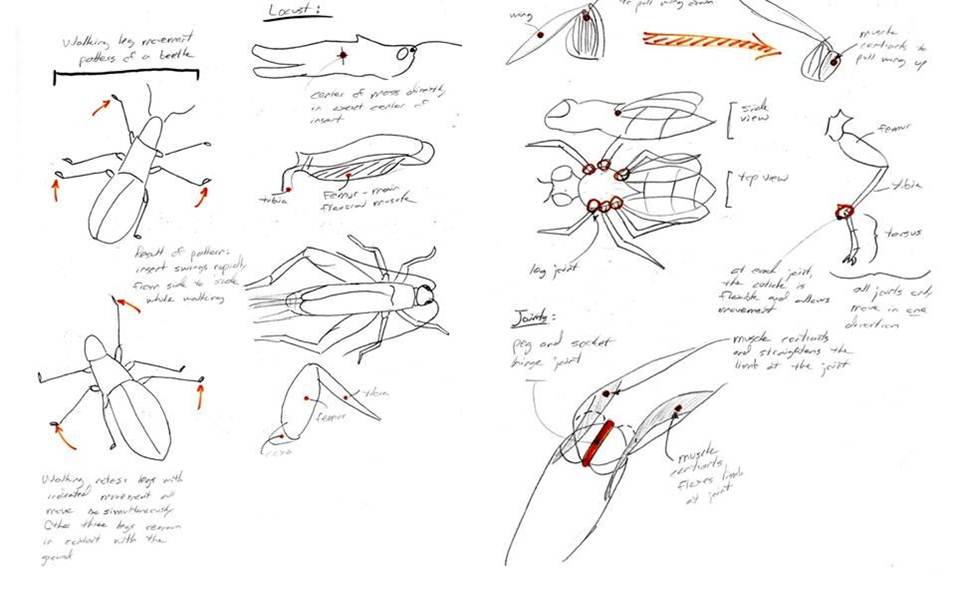
The following images are snapshots from my work process. Starting with research and ideation, these are some initial sketches I created to develop more of an understanding for the muscular structure and body movements of typical insects.
Through my research, I rapidly found myself to be most interested in the cricket/locust/grasshopper style insect. I started to catalog a large quantity of pictures capturing this specific group of insects jumping, walking, and standing. I used these to develop a simplified ‘trapezoidal insect-hopper form’ for my own creation, as illustrated below. I also used two stylized sweeps to divide the head and Pronotum from the rest of the body.
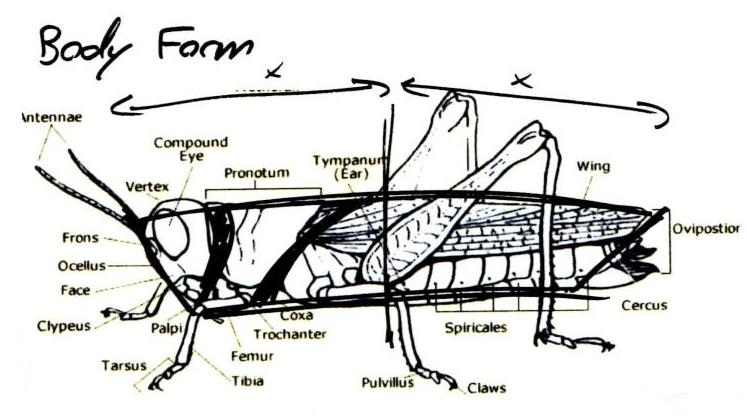
However, I quickly found the body structure of these insects has just as much importance to its motion as its muscles do. For example, one of the reasons jumping insects are capable of such large vertical leaps is the layout of their body. As illustrated below, the powerful rear legs join the body at its half-way point, which happens to be the insect’s center of gravity. This allows the insect to launch itself into the air vertically instead of completing a high powered backflip on the ground.
With these thoughts in mind, I started the development process with some initial foam core prototypes. I used these to experiment with the form, overall scale, and mechanical links to create individual working components, such as the rear legs, motor housing, and visual accessories such as the front legs and antennae.



The following pictures are small thumbnails of the larger development process. After three different iterations of designing parts in SolidWorks then constructing an acrylic laser cut version, the final version was born–yielding a working, jumping mobile mechanical creation.
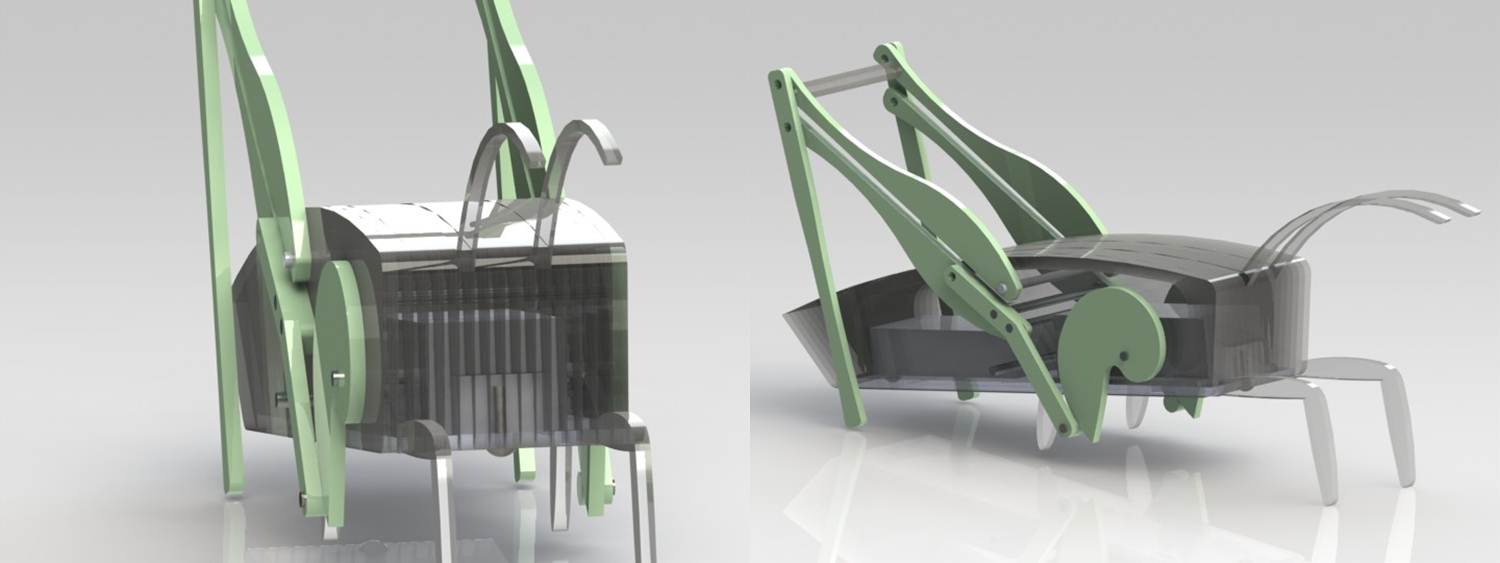
As illustrated in the CAD rendering above, the final design was intended to showcase a different style acrylic for the moving components. This would promote the purpose of the device, as a study on mechanical movement, directing the user to watch the specific interactions between the mechanical components. Unfortunately however due to project time constraints I never had a chance to acquire the matte green acrylic sheets necessary for my idea.

















Copyright © Scott Fisher
Leave a Reply